FC-25A型3D工业视觉检测实训平台

一、面向专业和课程
面向专业:人工智能、电子、自动化、机电等专业
适用课程和知识点:数字图像处理、机器视觉、3D视觉、基于视觉的机器人应用
二、产品概述
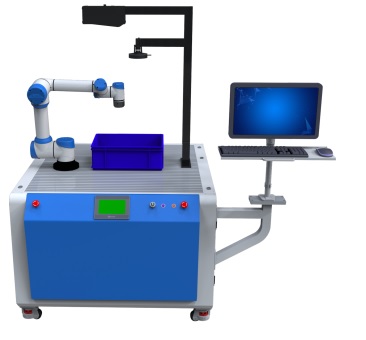
3D工业视觉检测实训平台主要由3D智能相机、2D工业相机和协作机器人组成,搭配多种行业应用的真实工件和虚拟仿真应用场景,融合了3D视觉系统调试应用开发、2D视觉系统应用技术、图形化视觉处理技术、机器人离线编程与调试技术、深度学习等实训功能。实训平台提供配套完善的实训教材与培训视频,能满足视觉算法、软件、机械、电气以及机器人相关专业的教学,开展从机器人基础示教、离线编程,到复杂视觉应用开发等知识点的实验实训。
三、产品简要介绍如下:
1.满足数字图像处理、机器视觉、3D视觉、基于视觉的机器人应用等课程或知识点的教学;
2.标配AUBOi5机器人,并可兼容ABB、KUKA、FUNAC、YASKAWA、UR、AUBO、JAKA等多种机器人,可在学院现有机器人基础上进行升级改造;
3.3D智能相机可处理各类工件以及纸箱、麻袋、货品等典型物体,支持随意堆叠、无序放置、反光、暗色等复杂工况;
4.2D视觉软件包括缺陷检测、分类、实例分割等功能,可对物体快速进行识别、定位、缺陷检测等功能的开发;
5.机器人编程软件采用完全图形化的智能编程环境,支持数字孪生,且内置轨迹规划、碰撞检测、混码等智能算法;
6.配套提供多种来自于真实工业现场的案例和实训套件,可采用项目引导式的方式开展教学,真正提升学生解决实际问题的能力。
四、产品功能和特点
1.图形化编程环境
完全图形化的视觉软件,无需编写代码即可完成拆垛、无序工件上料等视觉应用,且内置3D视觉、深度学习等前沿算法模块,可满足复杂多样的应用需求。
2.提供深度学习自主训练工具
将深度学习模型训练的数据采集、筛选、导入、标注、模型训练、验证及部署应用的过程进行全流程整合,方便自主操作,提升训练效率,并全程保证数据安全性。
3.3D点云生成与分析
精度高,可对众多类型的物体产生完整、细致、精确、颜色准确的点云数据,且支持3D通用处理算法、3D特征处理、3D模型的创建和匹配等多种功能。
4.基于3D/2D视觉的机器人应用
提供机器人智能编程环境,采用可视化、无代码的编程界面,支持一键仿真。软件内置机器人轨迹规划、碰撞检测、抓取规划等智能算法,可快速实现机器人在3D/2D视觉系统引导下进行机械臂位姿的调整,姿态控制,并完成物体的抓取、分类、拆码垛等功能。
五、主要硬件参数
1.运算单元
采用工业级结构,体积小巧,外形紧凑,安装windows10系统,集成C++、OpenCV等运行环境,支持数字图像处理、2D视觉、3D视觉、机器人等硬件或应用的开发和学习。
主要技术参数和特点如下:
(1)处理器:酷睿i7;内存:16G工控内存;硬盘:256G固态硬盘+1T机械硬盘;显存:4G;网口:4个千兆网口;
(2)支持图形化交互界面,采用拖拽式操作快速搭建视觉方案,满足机器视觉应用领域中定位、测量、识别、检测等需求。
2.3D视觉系统
采用Mech-Eye工业级3D相机,该相机基于先进的视觉算法,可处理各类工件以及纸箱、麻袋、货品等典型物体,轻松应对随意堆叠、无序放置、一定程度反光、暗色等复杂工况。
3D视觉系统主要技术参数如下:
(1)分辨率:1920×1200;工作距离范围:500-1000mm;近端视场:物距为0.5m时,370×240mm;远端视场:物距为1m时,800×450mm;
(2)提供多语言、多平台的SDK选择,接口开放,部署简单;
(3)可选择搭配Mech-Vision、Mech-Viz使用,轻松、快速部署各类检测/量测应用。
3.2D视觉系统
机器视觉系统即一套标准工业级视觉系统,包括工业相机、镜头、LED光源、光源控制器等,通过视觉支架进行集成,为所有的静态目标检测、分析和处理提供实验的硬件环境。
视觉系统结构如下:
2D视觉系统主要技术参数如下:
|
序号 |
技术参数 |
|
1 |
(1)600万像素 1/1.8” CMOS 千兆以太网工业面阵相机; (2)分辨率:3072×2048; (3)帧率:17 fps; (4)动态范围:71.3dB; (5)增益:0dB~20dB; (6)曝光时间:27μs~2.5sec; (7)黑白/彩色:彩色; (8)接口:GiGE。 |
|
2 |
(1)固定焦距、手动光圈、六百万像素、FA镜头; (2)焦距:12mm; (3)F数:F2.8~F16; (4)接口类型:C-Mount; (5)视场角:1/1.8”。 |
|
3 |
(1)LED类型:贴片LED; (2)颜色:白色; (3)色温:6600K; (4)功率:14.4W; (5)输入电压:DC 24V max.; (6)外壳材质:铝合金(表面氧化发黑处理);(7)使用温度和湿度:温度:0~40ºC,湿度:20~85%RH(非凝结); (8)配套光源控制器。 |
4.协作机器人
采用遨博i5协作机器人,该型机器人专注末端负载为5kg以下的3C领域自动化作业,可应用于3C、金属加工、食品、医药、科研培训、物流等行业,实现上下料、装配、锁螺丝、喷涂、打磨、焊接等应用。
协作机器人主要技术参数如下:
|
序号 |
类别 |
技术参数 |
|
1 |
机械臂 |
(1)自由度:6 (2)臂展:1053.5mm (3)负载:5kg (4)重量:24kg (5)额定寿命:30000h (6)协同操作:根据ISO10218-1:2011进行协同操作,具备“安全适用的受监控停止”、“拖动示教”以及“功率与力限制”等协作机器人安全功能 (7)定位精度:±0.02mm (8)末端速度:≤2.8m/s (9)功耗:200W (10)材料:铝合金 (11)防护等级:IP54 (12)供电电源:48V |
|
2 |
运动特性 |
(1)1轴:+175°~-175°,最大速度150°/s; (2)2轴:+175°~-175°,最大速度150°/s; (3)3轴:+175°~-175°,最大速度150°/s; (4)4轴:+175°~-175°,最大速度180°/s; (5)5轴:+175°~-175°,最大速度180°/s; (6)6轴:+175°~-175°,最大速度180°/s。 |
六、软件平台介绍
1.3D视觉软件平台
3D机器视觉软件采用梅卡曼德的Mech DLK平台,该平台为完全图形化的视觉软件,无需编写代码即可完成拆垛、无序工件上料等视觉应用。内置3D视觉、深度学习等前沿算法模块,可满足复杂多样的应用需求。
2.2D视觉软件平台
2D机器视觉软件采用海康威视Vision
Master视觉软件,图形化交互界面,功能图标直观易懂,采用拖拽式操作,可快速搭建视觉方案,模块运行状态独立标识,实时显示。
主要技术参数和特点如下:
(1)包含近千个图像处理算子和多种交互式开发工具,包含130+个模块工具,支持多种操作系统和图像采集硬件设备;
(2)用户可以根据需求创建视觉方案,还可以自定义运行界面,满足个性化需求;
(3)兼容GigE Vision和USB3 Vision协议标准,可以接入多种品牌的相机,支持本地图像处理和相机数据图像处理;
(4)二次开发简单易上手,通过简化后的接口可以节省90%的代码量,新增的控件可一键导入Visual Studio中,可嵌QT,MFC,WPF和WinForm的界面开发中;
(5)支持用户自定义模块开发,用户可将自定义算法封装为VM模块后直接拖拽使用;
(6)支持TCP/IP,ModBus,串口,UDP,Ethernet/IP等常见工业通信协议,能兼容主流PLC型号的通讯。
七、实验项目
平台配备10多个实训项目的软硬件资源,包括工程、实训操作文档和培训视频等。
其中纸箱拆码垛、电机转子上料、钢筋打标计数等应用场景的简要情况如下:
1.纸箱拆码垛
该项目模拟实际工业场景的纸箱拆码垛。
2.电机转子上料
该项目模拟实际工业场景的电机转子上料。
3.钢筋打标计数
该项目模拟实际工业场景的钢筋打标计数。
八、实验课程
平台可支撑和构建的课程,涵盖《3D视觉实操与应用技巧》、《AI+机器视觉典型应用案例实践》等。
1.《3D视觉实操与应用技巧》实训任务清单
|
序号 |
类别 |
课程资源 |
|
1 |
安装3D视觉系统 |
(1)机械安装 (2)线缆安装 (3)软件安装 |
|
2 |
采集3D相机的图像数据 |
(1)连接相机 (2)配置相机参数 (3)保存数据 |
|
3 |
图像标注和深度学习模型训练 |
(1)新建DLK工程 (2)算法模块介绍 (3)导入图像数据 (4)数据集介绍 (5)图像标注和模型训练 (6)模型验证和模型应用 |
|
4 |
视觉主控烧录 |
(1)主控烧录准备 (2)主控烧录操作 (3)主控移动控制机器人 |
|
5 |
相机外参标定 |
(1)相机外参标定概述 (2)标定前准备 (3)采用多个随机标定板位姿方式的ETH标定 (4)采用多个随机标定板位姿方式的EIH标定 (5)采用TCP尖点触碰方式的ETH标定 (6)采用TCP尖点触碰方式的EIH标定 |
|
6 |
制作点云模板和添加抓取点 |
(1)点云模板和抓取点概述 (2)生成点云模板 (3)编辑点云模板 (4)添加抓取点 (5)保存点云模板和抓取点 |
|
7 |
搭建视觉工程 |
(1)Mech-Vision软件的基本操作 (2)常用步骤介绍 (3)步骤组合介绍 (4)工程实战—电机转子上料的Mech-Vision工程搭建 |
|
8 |
搭建机器人工程 |
(1)Mech-Viz软件的基本操作 (2)常用任务介绍 (3)工程实战—电机转子上料的Mech-Viz工程搭建 |
|
9 |
3D视觉进阶功能 |
(1)查看3D视觉软件版本 (2)Mech-Vision典型应用工程介绍 (3)Mech-Vision示例工程介绍 (4)相机主控其它品牌机器人通讯 (5)认识标准接口 (6)3D视觉随机手册查阅 |
2.《AI+机器视觉典型应用案例实践》实训任务清单
|
序号 |
类别 |
课程资源 |
|
1 |
学前准备 |
(1)项目式教学概述 (2)3D视觉典型应用工作站概述 (3)学习资源概述 (4)典型应用工作站的使用注意事项 |
|
2 |
2D视觉典型应用—零部件缺陷检测 |
(1)零部件缺陷检测工作站的功能需求 (2)零部件缺陷检测工作站的系统实现流程 (3)零部件缺陷检测工作站的DLK工程实现 (4)零部件缺陷检测工作站的视觉工程实现 |
|
3 |
2D视觉典型应用—零部件尺寸测量 |
(1)零部件尺寸测量工作站的功能需求 (2)零部件尺寸测量工作站的系统实现流程 (3)零部件尺寸测量工作站的视觉工程实现 |
|
4 |
3D视觉典型应用—纸箱拆码垛 |
(1)纸箱拆码垛工作站的功能需求 (2)纸箱拆码垛工作站的系统实现流程 (3)纸箱拆码垛工作站的视觉功能实现 (4)纸箱拆码垛工作站的运动规划功能实现 (5)纸箱拆码垛工作站的使用注意事项 |
|
5 |
3D视觉典型应用—金属上下料 |
(1)金属上下料工作站的功能需求 (2)金属上下料工作站的系统实现流程 (3)金属上下料工作站的视觉功能实现 (4)金属上下料工作站的运动规划功能实现 (5)金属上下料工作站的使用注意事项 |
|
6 |
3D视觉典型应用—钢筋打标计数 |
(1)钢筋打标计数工作站的功能需求 (2)钢筋打标计数工作站的系统实现流程 (3)钢筋打标计数工作站的视觉功能实现 (4)钢筋打标计数工作站的运动规划功能实现 (5)钢筋打标计数工作站的使用注意事项 |
|
7 |
3D视觉典型应用—商超分拣 |
(1)商超分拣工作站的功能需求 (2)商超分拣工作站的系统实现流程 (3)商超分拣工作站的视觉功能实现 (4)商超分拣工作站的运动规划功能实现 (5)商超分拣工作站的使用注意事项 |
|
8 |
3D视觉典型应用—钢板开坡口 |
(1)钢板开坡口工作站的功能需求 (2)钢板开坡口工作站的系统实现流程 (3)钢板开坡口工作站的视觉功能实现 (4)钢板开坡口工作站的运动规划功能实现 (5)钢板开坡口工作站的使用注意事项 |